
シーケンサでプログラムを作成する際にはステップラダー(歩進回路)を組んでいき、
機械を動かす流れを作成していきます。
今回はシーケンサのステップラダーについて書いていきます。
ステップラダー(歩進回路)とは?
ステップラダーとは機械を動作させる際に順番に、
ひとつづつ機械を動かしていく回路になります。
身近な例として今回はクレーンゲームの動作を考えてみましょう!
- コインを入れる
- ボタンを押している間奥に移動する
- ボタンを離すと停止する
- 次に横に移動するボタンを押している間アームが動作する
- ボタンを離すと停止する
- 停止したらクレーンが下に降りる
- アームが閉じる
- 上に上がる
- 元の位置に戻る
- アームを広げる
- ぬいぐるみゲット!!!
というながれになると思います。
このように順番に進んでいく動作をステップラダーで作っていきます。
I/O(入力と出力)の整理
今回使用する入力と出力のリストです。
入力
X000 コインが入るとセンサーがONする
X001 アームが横に動くボタン
X002 アームが奥に動くボタン
X003 アームが上昇した
X004 アームが下降した
X005 アームが開いている
X006 アームが閉じている
X007 アームが定位置にいる
出力
Y000 アームが奥に移動する
Y001 アームが手前に移動する
Y002 アームが右に移動する
Y003 アームが左に移動する
Y004 アームが下降する
Y005 アームが上昇する
Y006 アームが開く
Y007 アームが閉じる
このリストを元に回路を作成していきます。
また、実際に動作する順番を先に想像していきます。
- コインが投入される。
- 次に横に動くボタンを押す
- ボタンを押している間アームが横に動く
- ボタンを離すとアームが停止する
- アームが停止したら次は奥に移動するボタンを押す
- ボタンが押されている間奥に移動する
- ボタンを離すとアームが停止する
- 停止したらアームが下降を始める
- 下降が完了するとアームが閉じる
- アームが閉じた後、アームが上昇する
- 上昇が完了したらアームが元の位置に移動する
- 移動完了したらアームが開く
- アームが開いたのを確認
- コインの投入を待つ
という順番で動作していくのだろうな~とあらかじめ洗い出しておきましょう!
実際にクレーンゲームの回路を順番に組んでいきます

1、まずはコインを投入しなければクレーンゲームは動かせないので、コインを投入し、認識する回路を作成します。
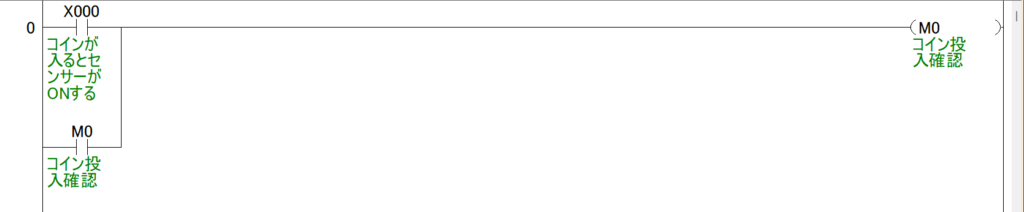
コインを投入されたらX000がONするので、X000がONしたらコインの投入を自己保持回路を作成します。
2、次はコインが投入されたのでアームが横に動くボタンを押します。
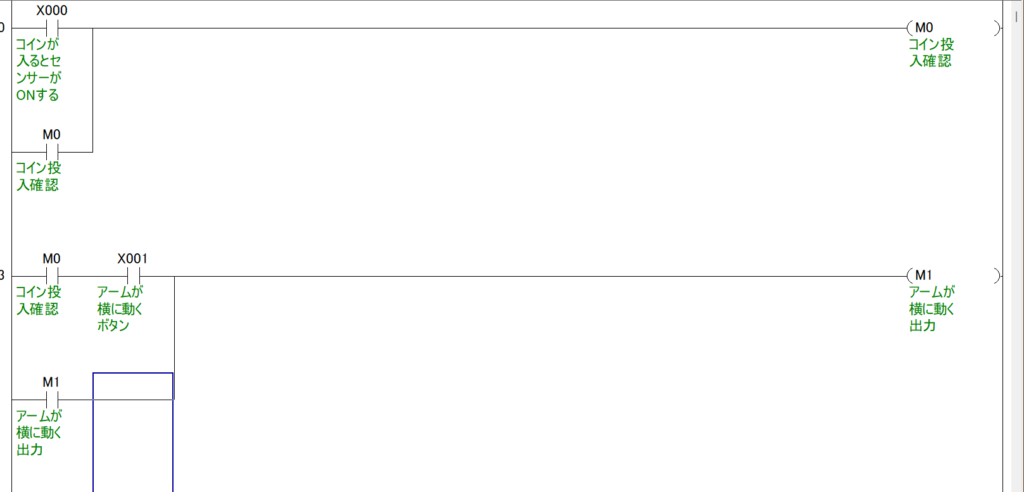
これでお金が投入される → ボタンを押すとアームが動く という流れになります。
ただしこのままですとM0を切る回路がないので、M1でM0の自己保持を解除する回路にします。
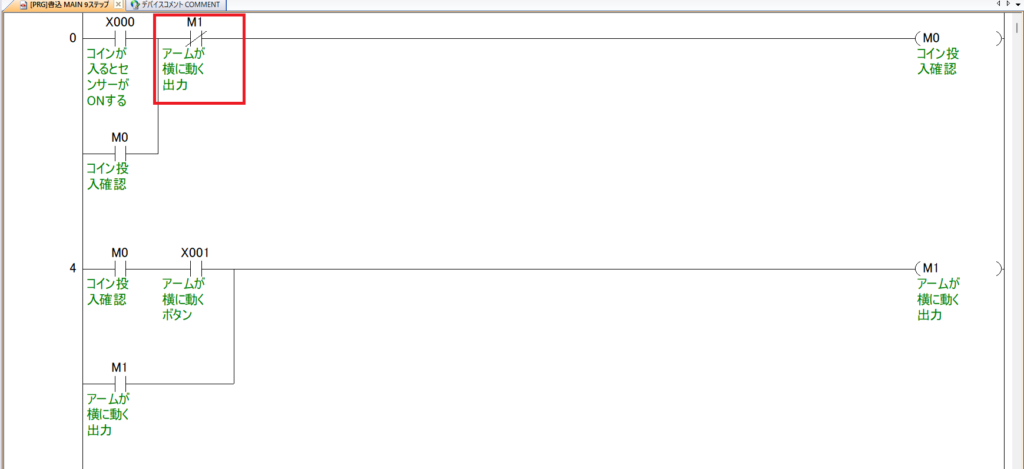
そして、M1がONしている間はアームが横に動かないとおかしいので、
M1のリレーでアームが横に動く出力(Y002)をONさせます。
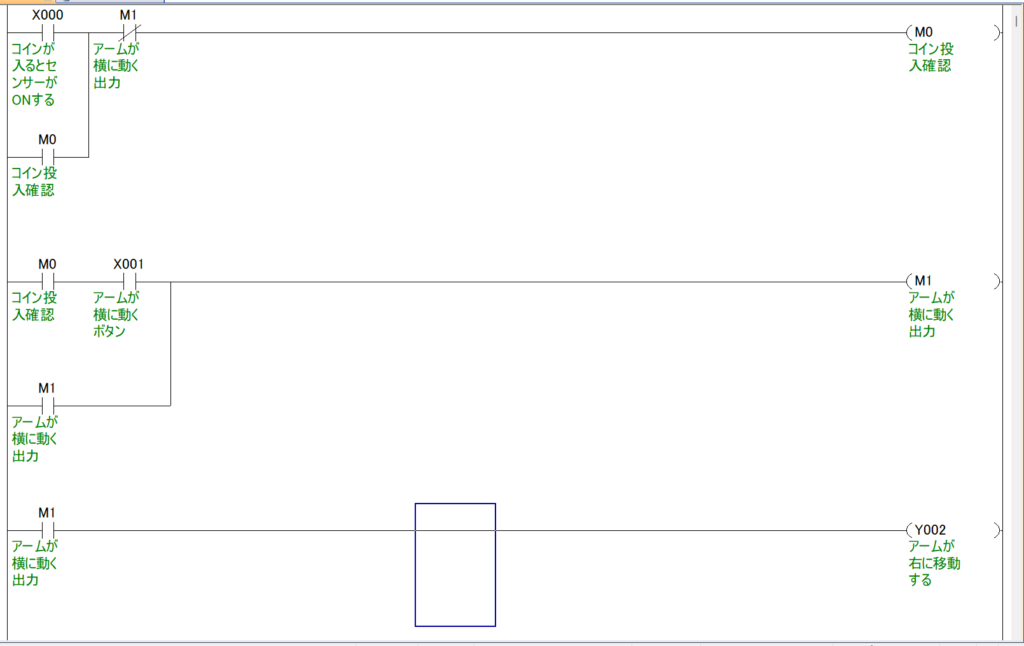
ここまでがステップラダー(歩進回路)の基本になります。
動作する条件を自己保持する → 次の条件や動作で前の回路の自己保持を切ると同時に自己保持する
これの繰り返しで回路を作成していきましょう!
3,4 ボタンを押している間横にアームが動作し、離すと停止する。
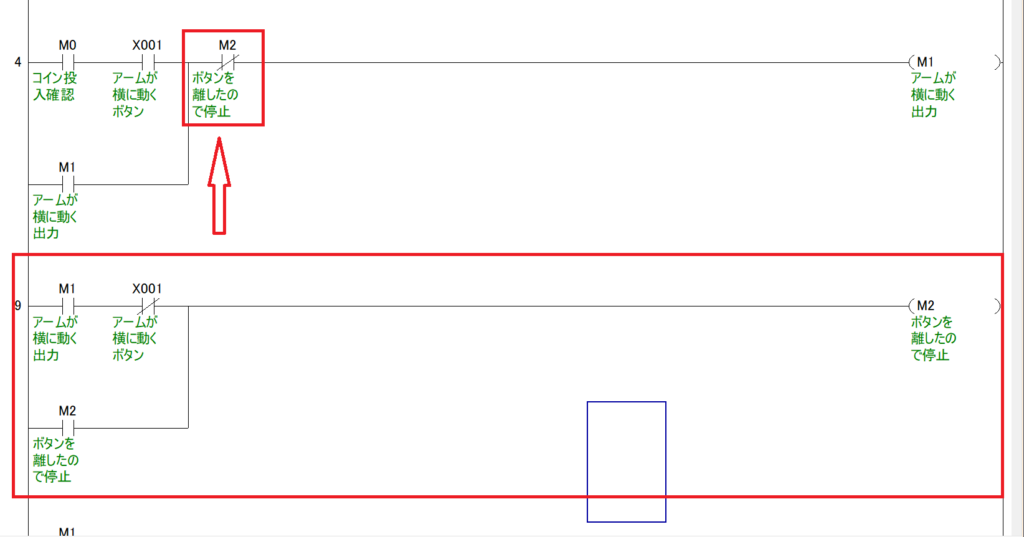
M1のa接点とX001のb接点を自己保持の条件にしてM2で自己保持をする。
M2の条件でM1のアームが横に動く出力を切ることでボタンを離すと横に動く出力を切ります。
5、6、7、アームが停止したら次は奥に移動するボタンを押す。ボタンを押している間奥に移動する
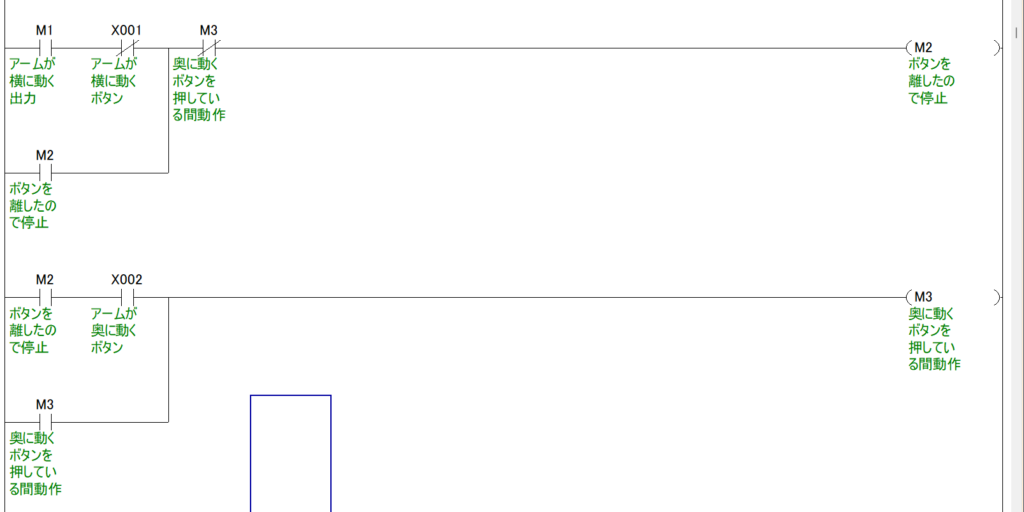
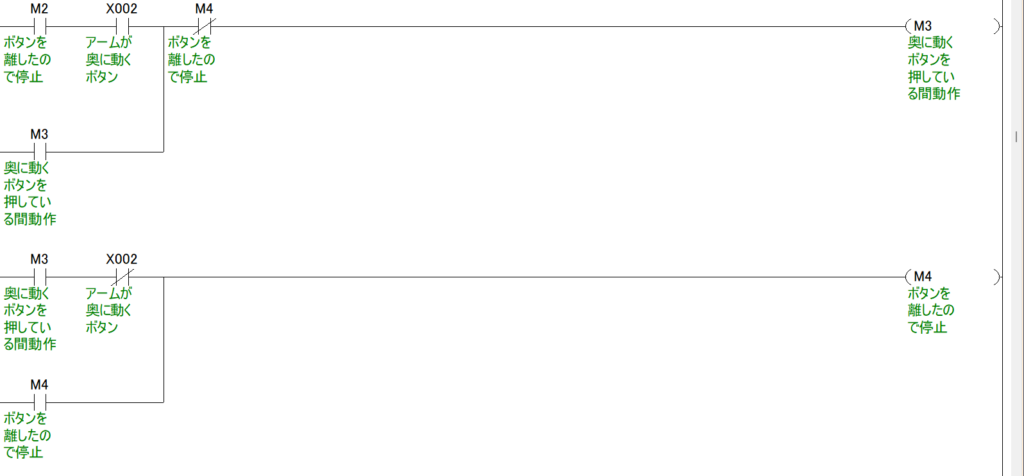

3、4、番目の動作の繰り返しで、 アームが奥に移動する動作を作成していきます。
8、停止したらアームが下降を始める
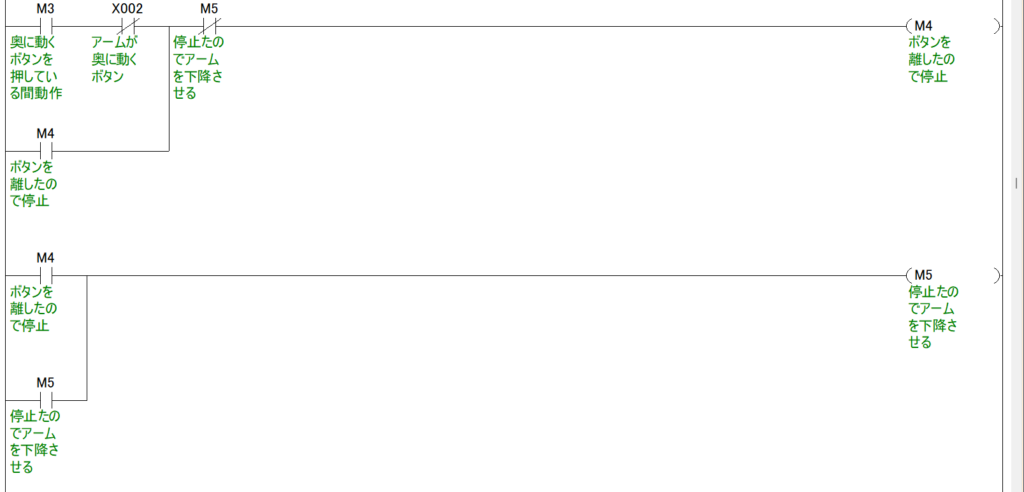

9、下降が完了するとアームが閉じる
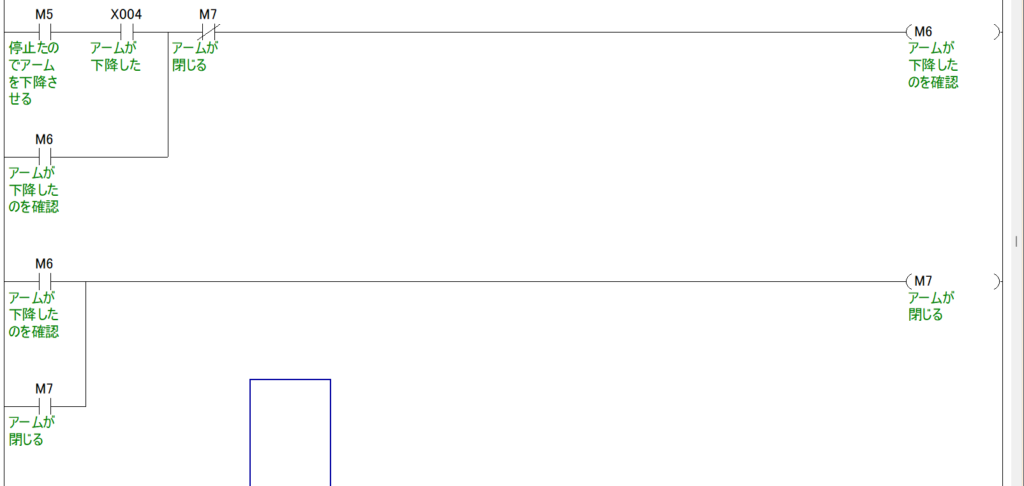
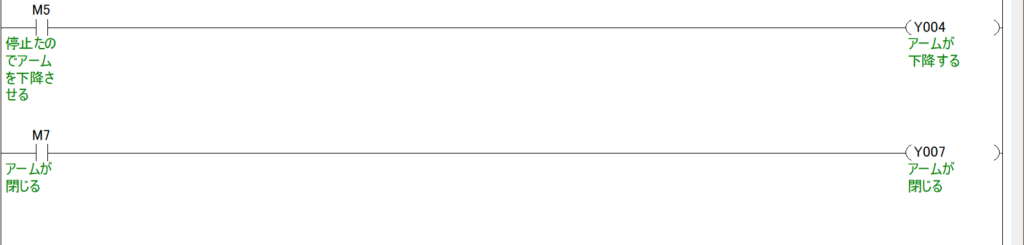
アームが停止して下降している出力をX004のアームが下降したのを確認して保持します。
保持した接点でM5を切る。
次にM6がONした接点でM7をONさせてアームを閉じさせてぬいぐるみを掴みに行きます。
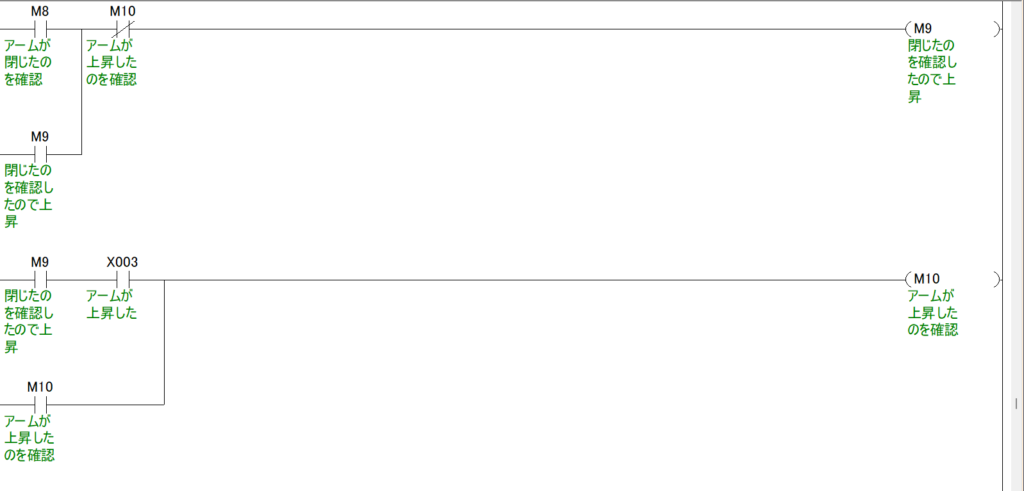
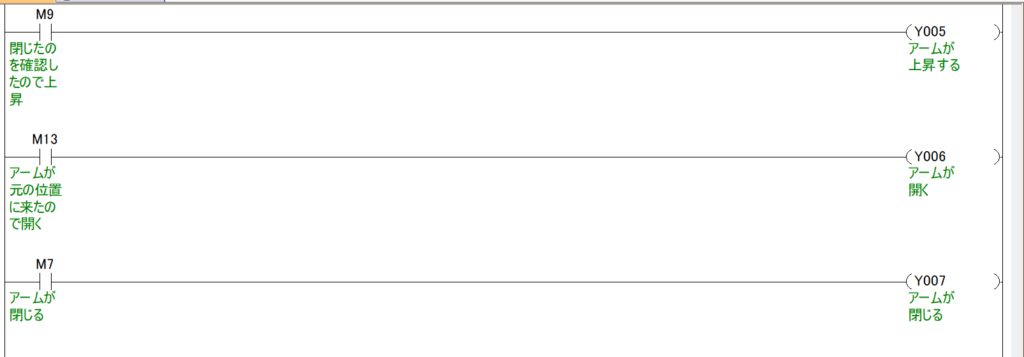
10、アームが閉じた後、アームが上昇する
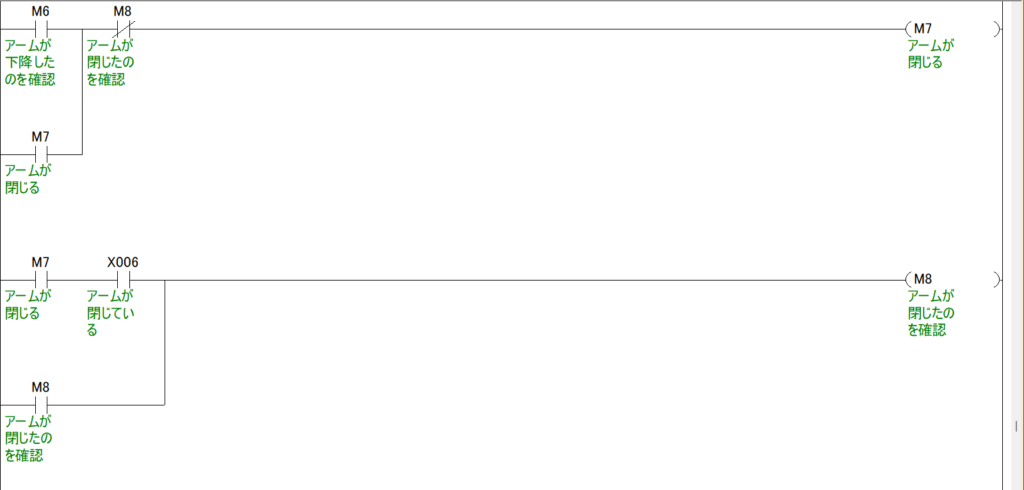
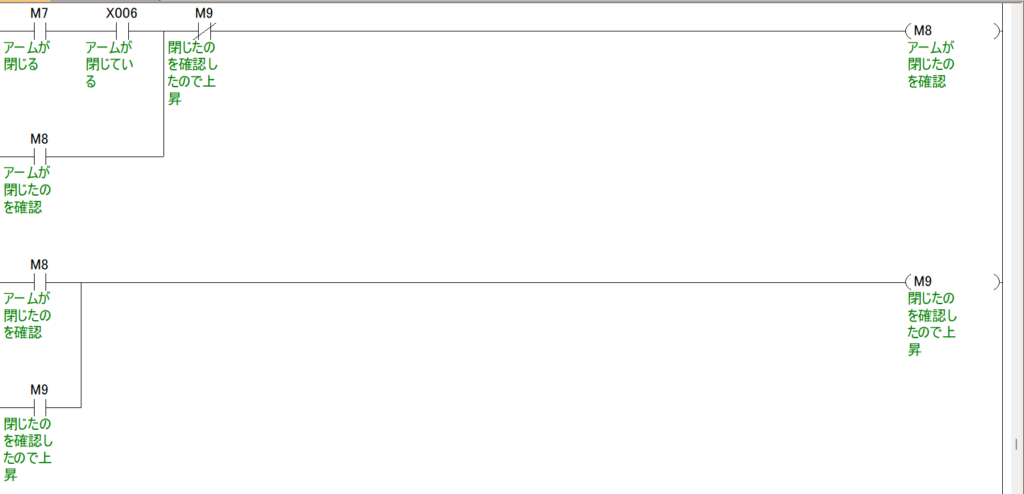

アームを閉じたのを確認して、アームを上昇させる。
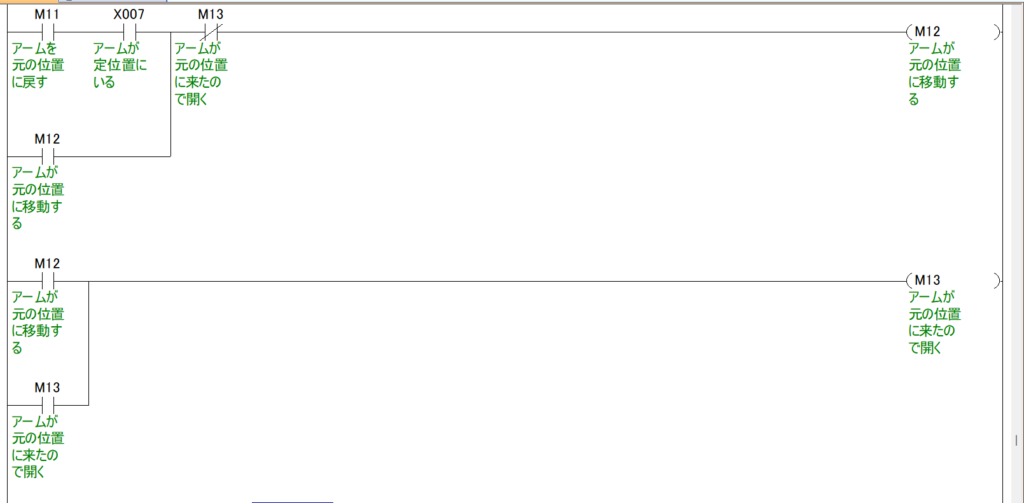
11、上昇が完了したらアームが元の位置に移動する

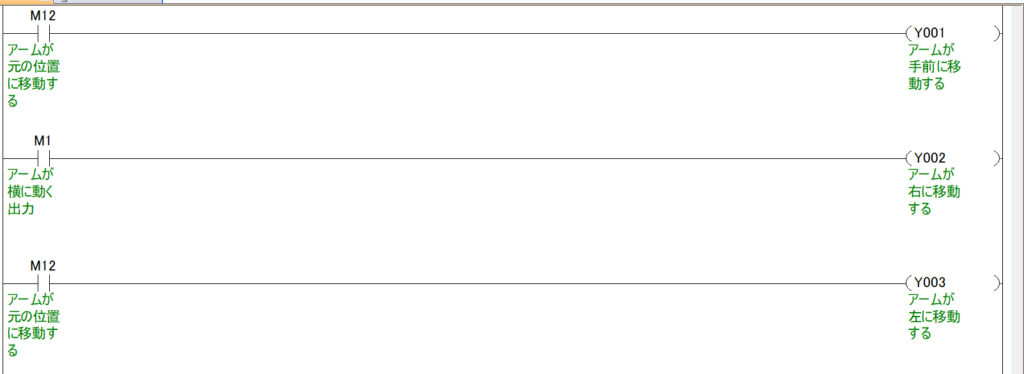
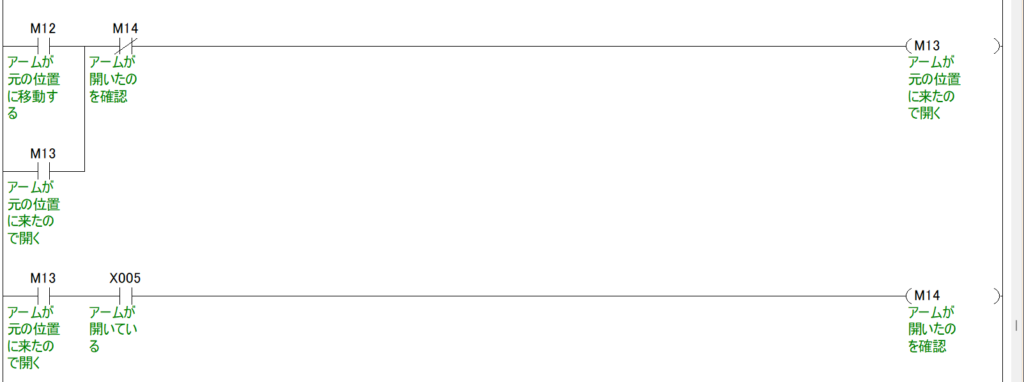
12、13、移動完了したらアームが開いて、開いたのを確認する
ステップラダーのまとめ
基本的には自己保持をして、次の工程に進んだら次の自己保持回路を作成し、
その自己保持回路の接点で前の自己保持を解除する。
という繰り返しでプログラムを作成していきます。
簡単な回路であればステップラダー+タイマーだけで完結させることも可能です。
単純な回路ではありますが、この回路の作り方を覚えることで
色んな動作のプログラムを作成できるようになるので
ぜひ習得してください!

